

 08寸手持控制器
08寸手持控制器 10寸控制器
10寸控制器 12寸控制器
12寸控制器 15寸控制器
15寸控制器 17寸控制器
17寸控制器 19寸控制器
19寸控制器 BK1系列伺服驅動器
BK1系列伺服驅動器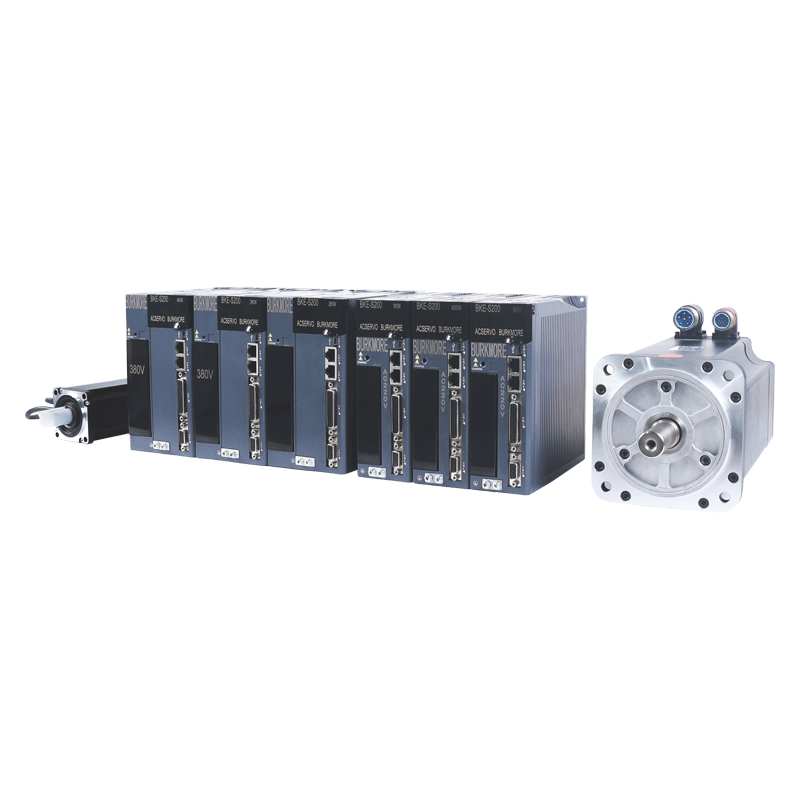 Bk2系列伺服驅動器
Bk2系列伺服驅動器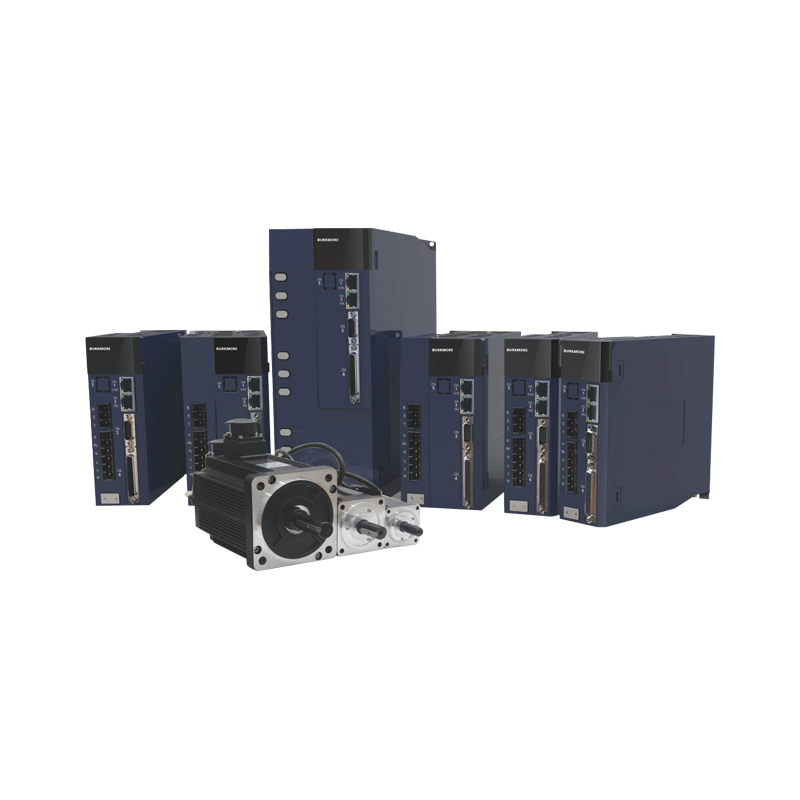 Bk3系統高性能伺服驅動器
Bk3系統高性能伺服驅動器 BKM多合一系列產品
BKM多合一系列產品 BKB低壓總線混合伺服驅動器
BKB低壓總線混合伺服驅動器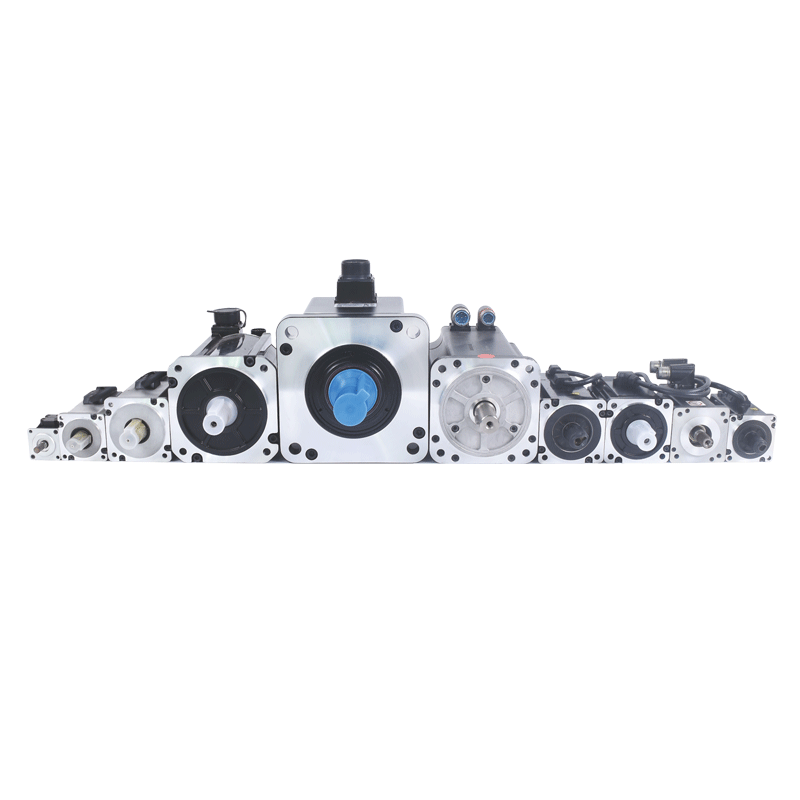 BKT系列電機
BKT系列電機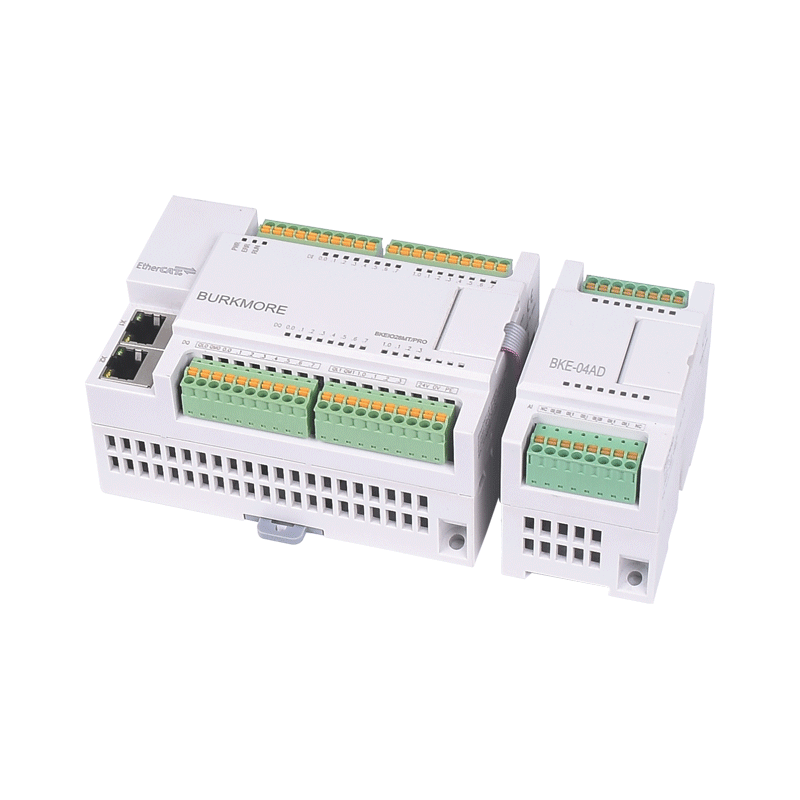 現場總線IO
現場總線IO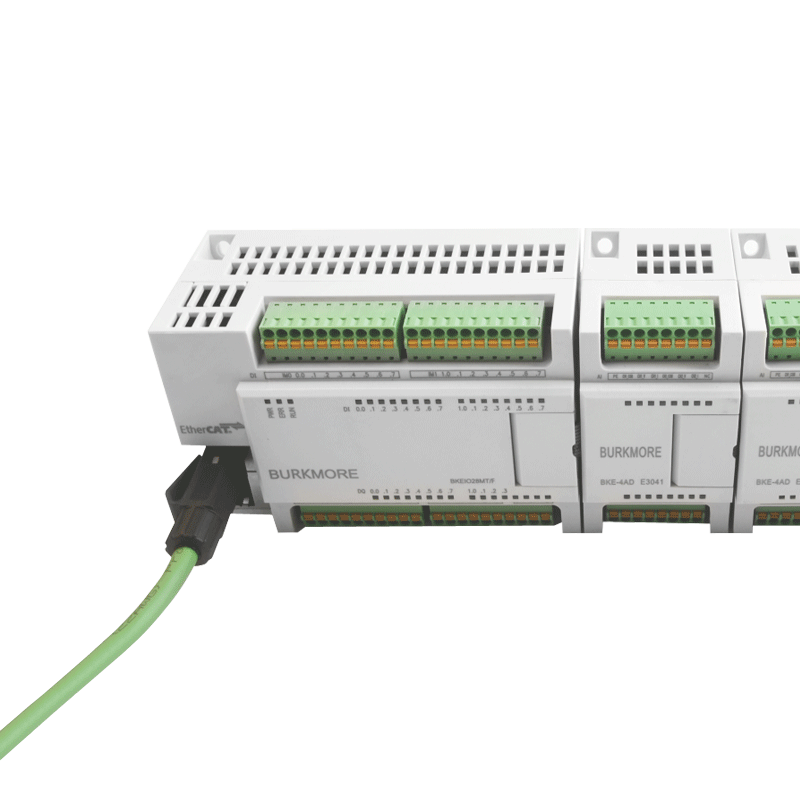 擴展模塊
擴展模塊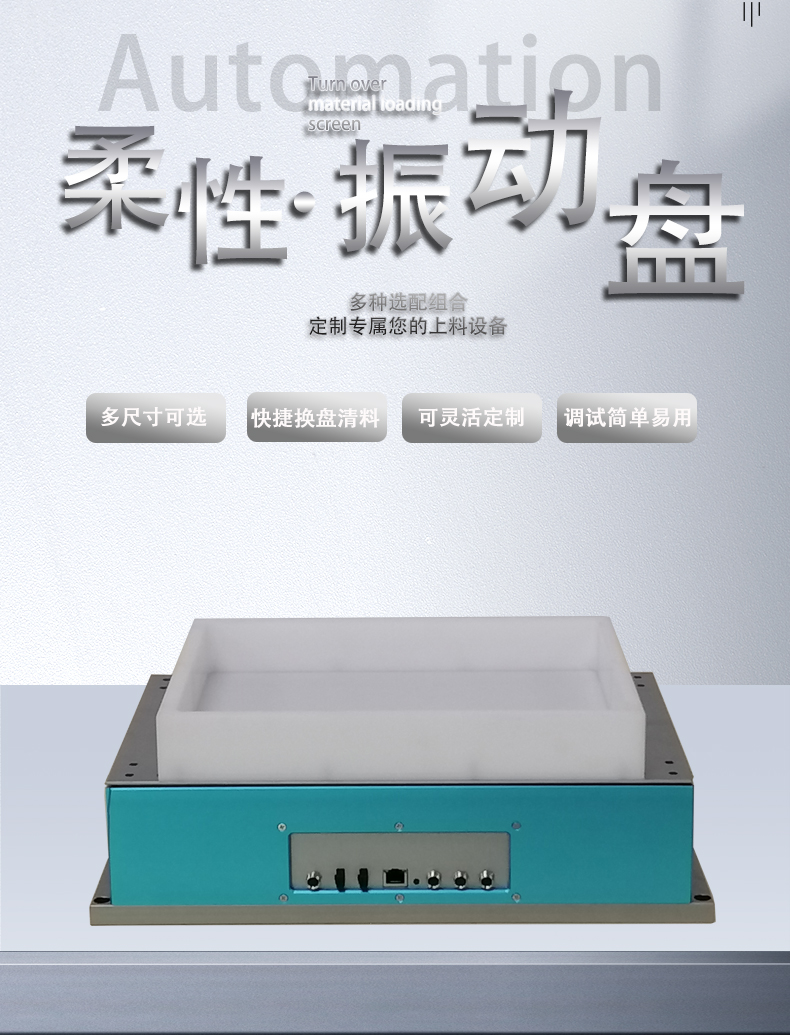 柔性振動盤|視覺供料設備
柔性振動盤|視覺供料設備 機器視覺
機器視覺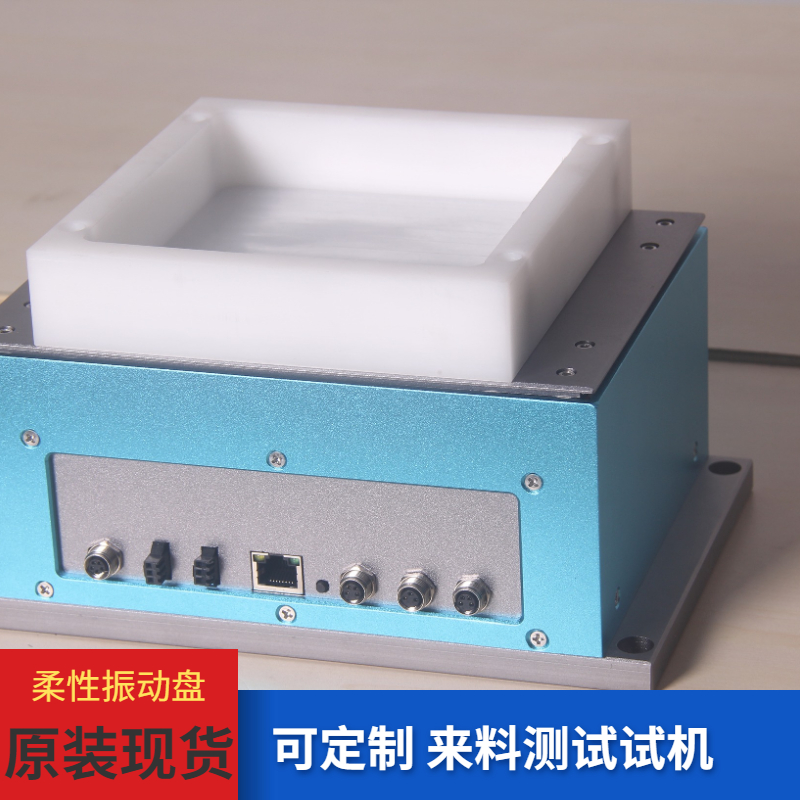 Burkmore柔性振動盤
Burkmore柔性振動盤 CDD柔性上料擺盤方案
CDD柔性上料擺盤方案 車床上下料機械手控制器操作說明
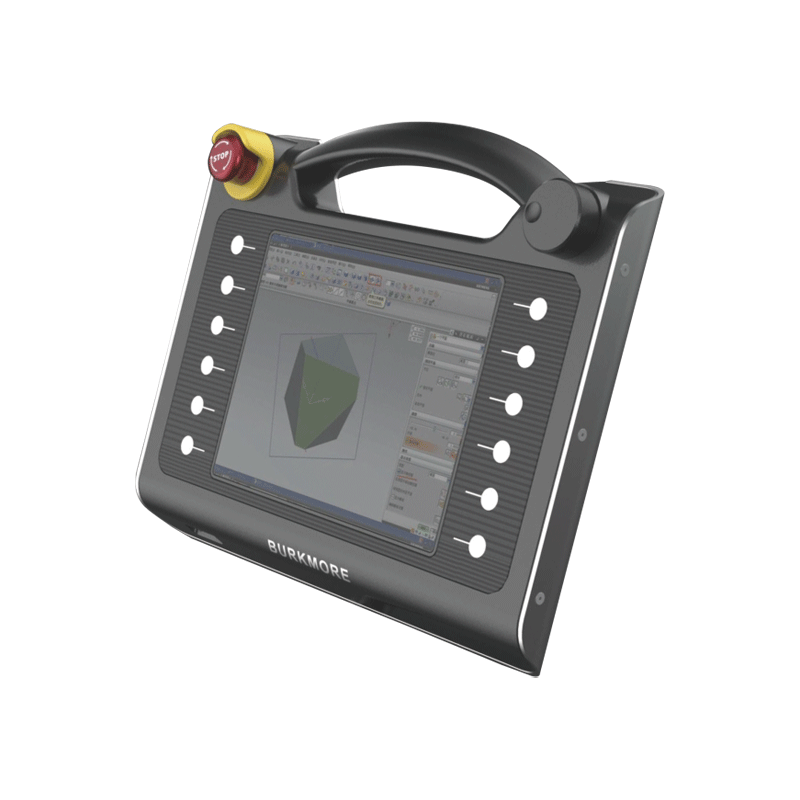
車床上下料機械手控制器操作說明




倍克摩爾車床上下料機械手控制器采用EtherCAT總線控制,實現了省線化的控制方式,并集成顯控一體的設計。這種創新性的控制器不僅具有高效、可靠的性能,還具備編程簡單的特點,為工業生產帶來了便利和卓越的性能。
首先,采用EtherCAT總線控制是該控制器的一大亮點。EtherCAT是一種高性能的工業以太網通信協議,它在傳輸速度上遠超其他常見的工業總線系統。通過引入EtherCAT總線,倍克摩爾車床上下料機械手控制器實現了高速、穩定的數據傳輸和實時控制。該控制器支持多個節點的連接,可同時控制多個機械手臂,實現高效率的自動化作業。
其次,倍克摩爾車床上下料機械手控制器采用顯控一體的設計。傳統的機械手控制系統通常需要獨立的顯控設備,占用更大的空間和資源。而這款控制器將顯示屏直接集成在機械手控制器中,使操作界面更加簡潔、便捷。操作人員可以通過觸摸屏直接進行指令輸入、參數設置等操作,無需額外的顯控設備,節省了場地和成本。
此外,倍克摩爾車床上下料機械手控制器具有編程簡單的特點。它提供了友好的編程界面和工具,使得即使對機器人編程不熟悉的操作人員也能夠快速上手。控制器支持多種編程語言,如G代碼、PLC編程和流程圖編程,適應不同的編程需求。通過簡單地定義坐標、速度和動作序列等參數,即可實現機械手在車床上下料的自動化操作。
總結起來,倍克摩爾車床上下料機械手控制器采用EtherCAT總線控制,顯控一體的創新設計,使其在工業自動化領域具備了明顯的優勢。通過高速、穩定的數據傳輸和實時控制,該控制器能夠有效提高生產效率和精度。同時,集成的顯示屏和簡潔的操作界面使操作更加方便快捷。最后,編程簡單的特點使得操作人員能夠快速上手并輕松實現自動化作業。倍克摩爾車床上下料機械手控制器的出現將為工業生產帶來更加高效、智能的解決方案。
