

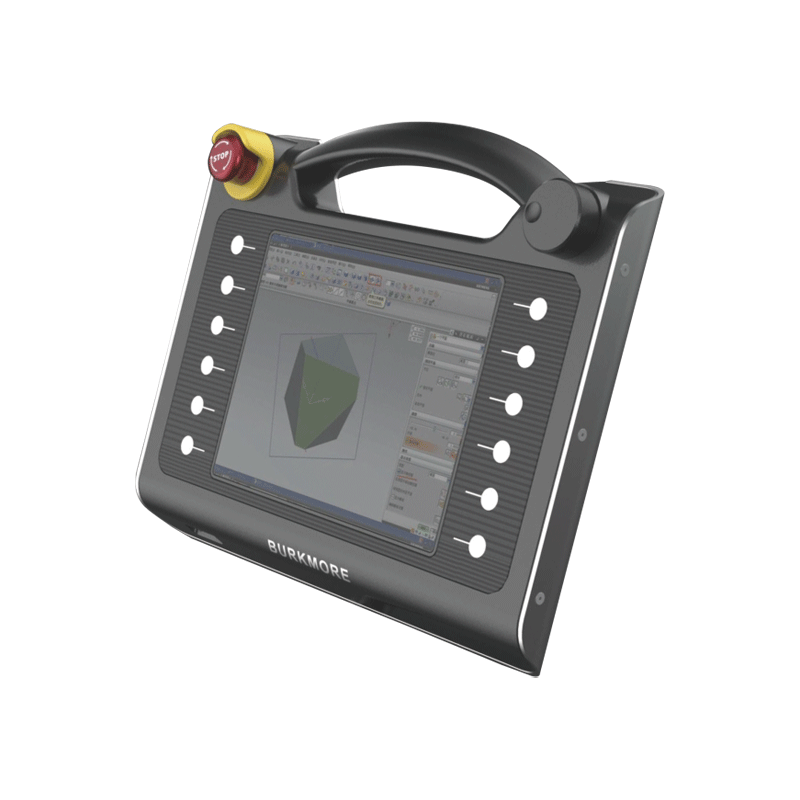
 08寸手持控制器
08寸手持控制器 10寸控制器
10寸控制器 12寸控制器
12寸控制器 15寸控制器
15寸控制器 17寸控制器
17寸控制器 19寸控制器
19寸控制器 BK1系列伺服驅(qū)動器
BK1系列伺服驅(qū)動器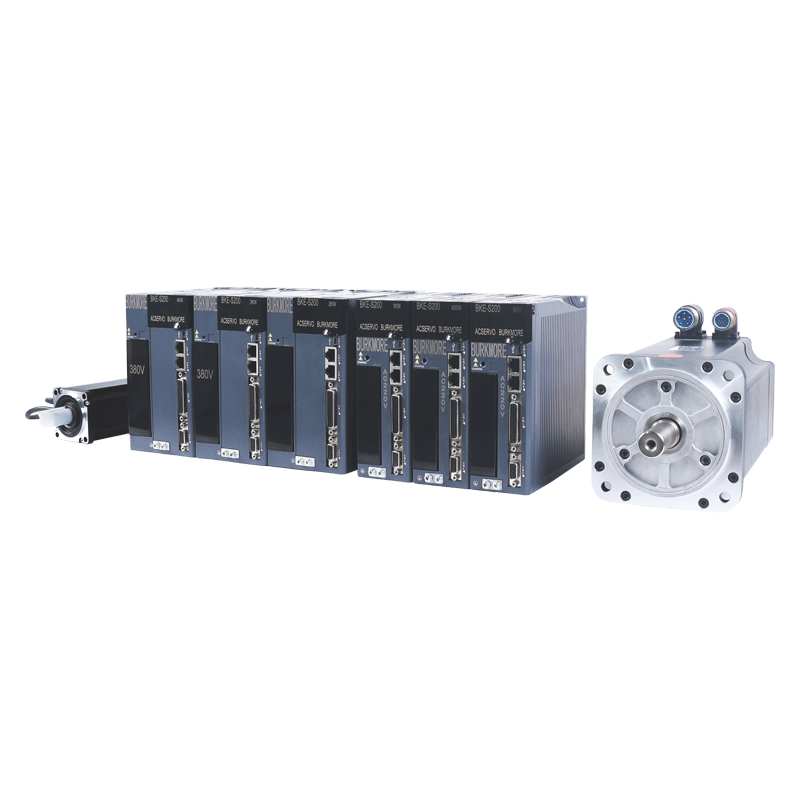 Bk2系列伺服驅(qū)動器
Bk2系列伺服驅(qū)動器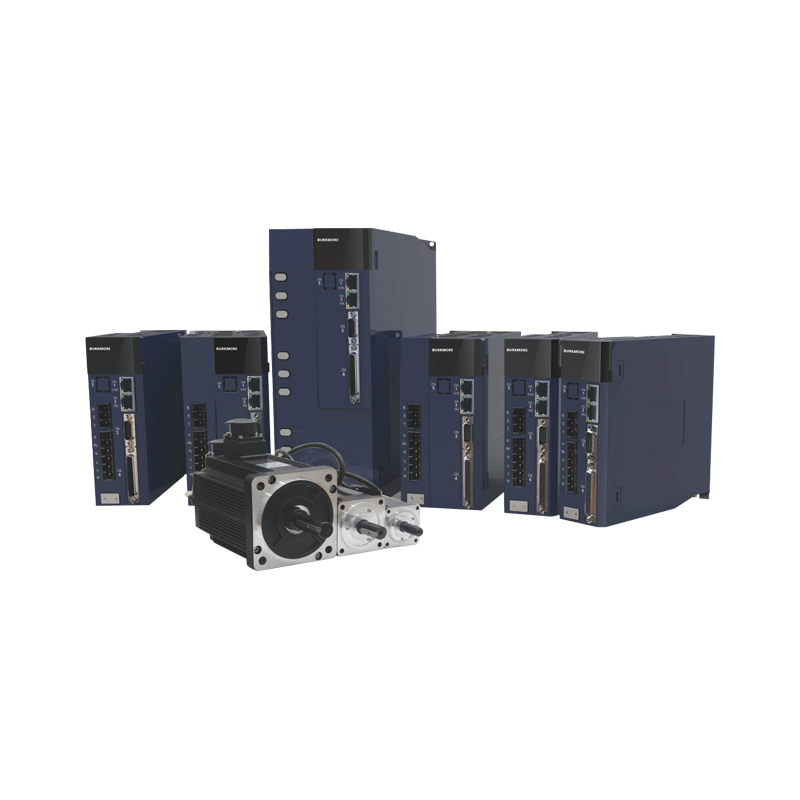 Bk3系統(tǒng)高性能伺服驅(qū)動器
Bk3系統(tǒng)高性能伺服驅(qū)動器 BKM多合一系列產(chǎn)品
BKM多合一系列產(chǎn)品 BKB低壓總線混合伺服驅(qū)動器
BKB低壓總線混合伺服驅(qū)動器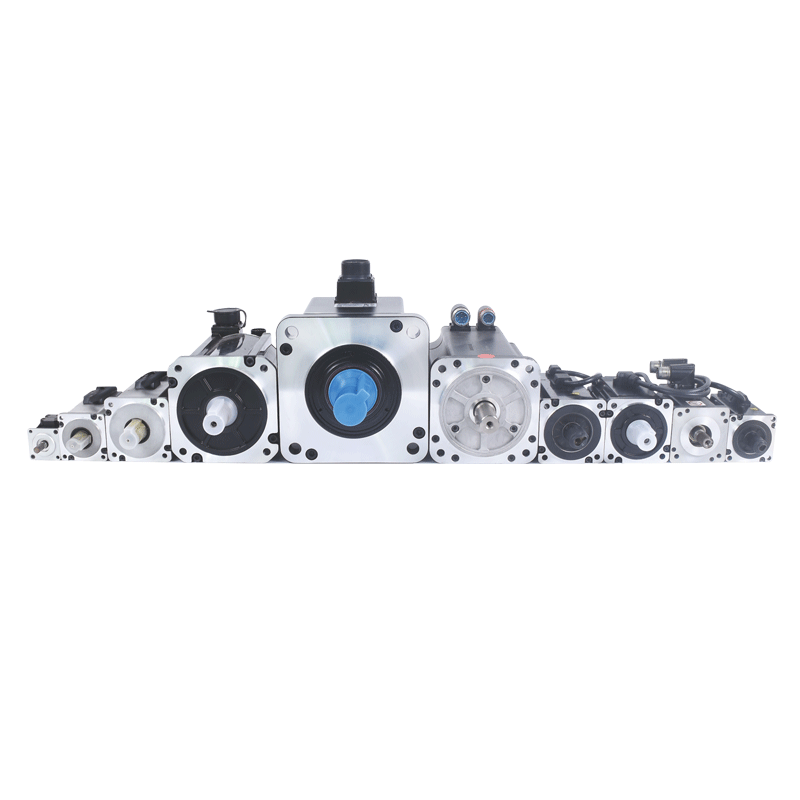 BKT系列電機
BKT系列電機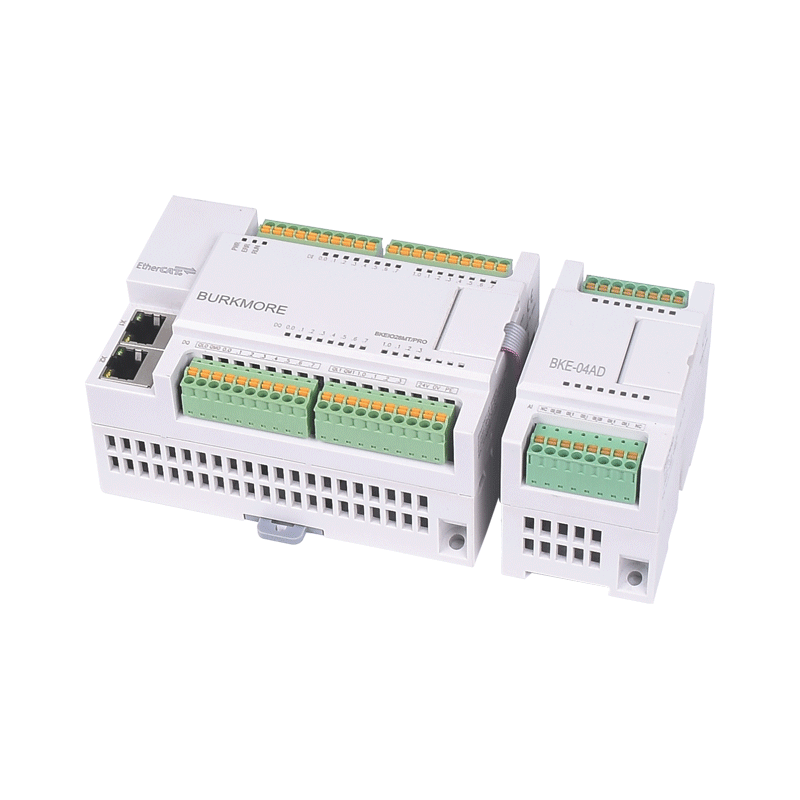 現(xiàn)場總線IO
現(xiàn)場總線IO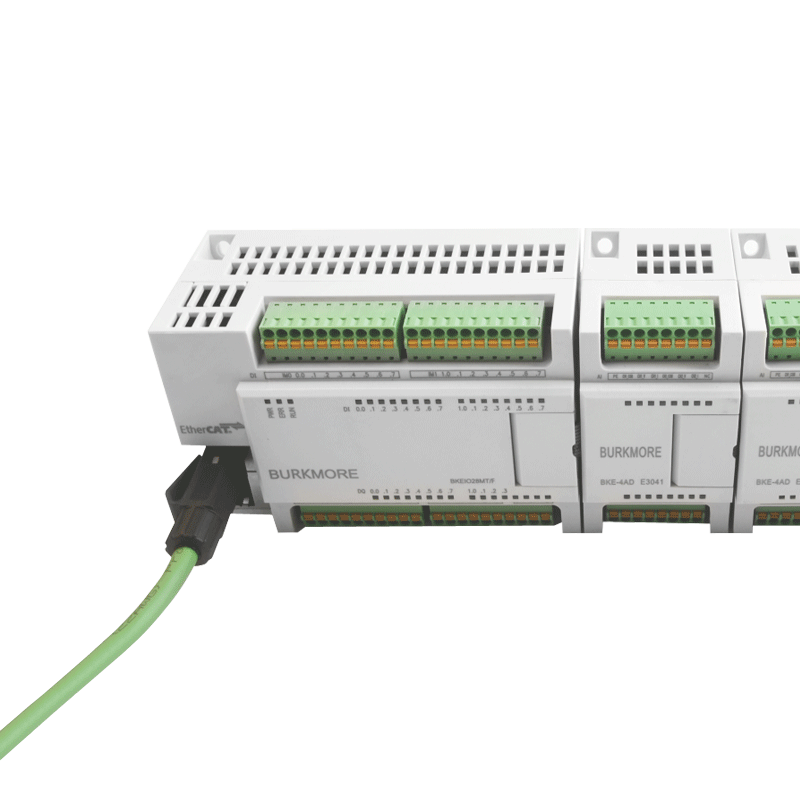 擴展模塊
擴展模塊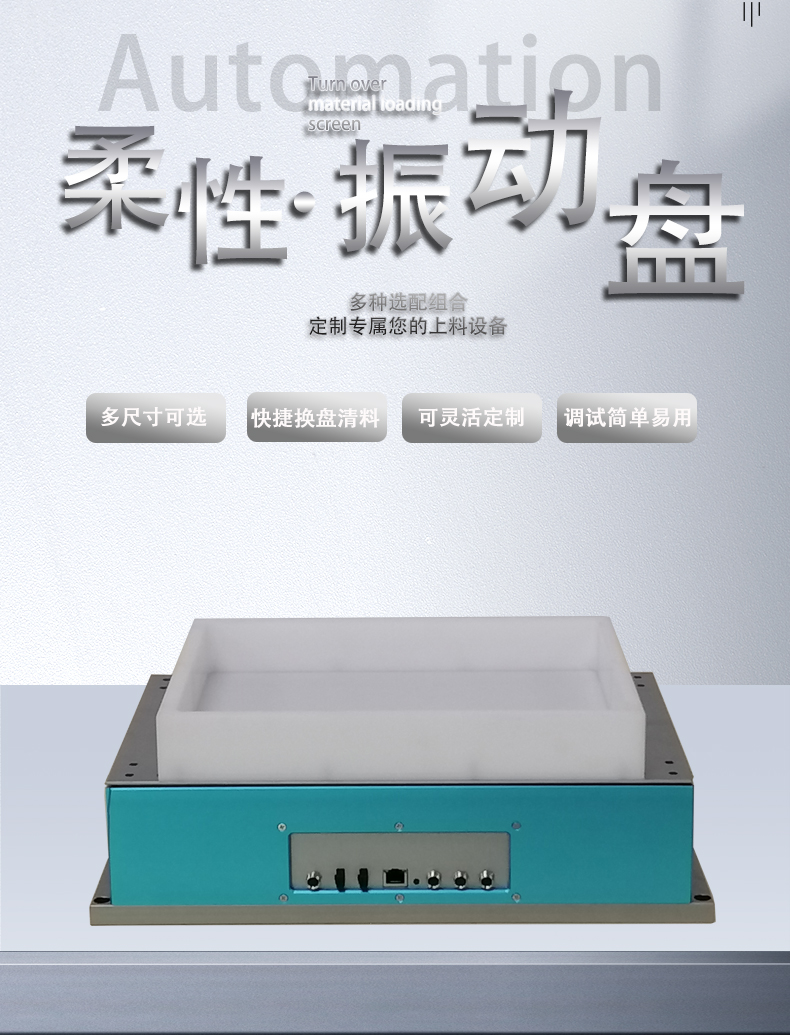 柔性振動盤|視覺供料設(shè)備
柔性振動盤|視覺供料設(shè)備 機器視覺
機器視覺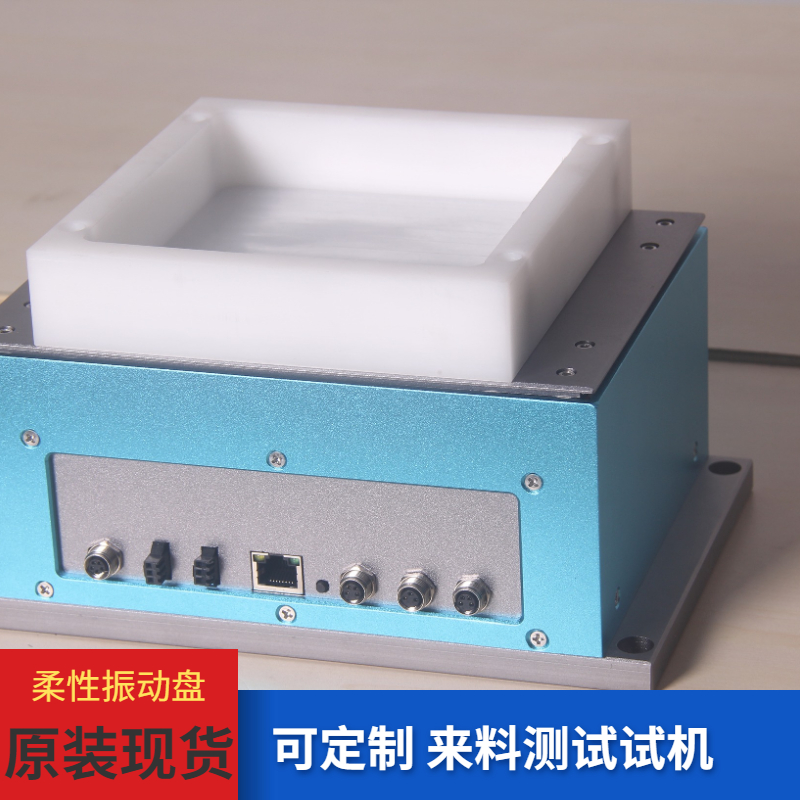 Burkmore柔性振動盤
Burkmore柔性振動盤 CDD柔性上料擺盤方案
CDD柔性上料擺盤方案 車床上下料機械手控制器操作說明
車床上下料機械手控制器操作說明





精準(zhǔn)定位
高精度、高效率、高穩(wěn)定的視覺測量算法,能準(zhǔn)確定位振動盤零件位置
通用性
視覺拍照定位,機器人抓取,適用各種小型零部件散料排列上料
簡單易操作
易于理解、快速掌握的友好界面。流程、界面均可任意擴展
一體化集成
機器視覺、機械手與柔性供料器集成一體化,視覺直接控制機器人運行,提高處理速度
多吸嘴取料提高效率
視覺控制多吸頭取料,實現(xiàn)快速運行,提高生產(chǎn)效率
供料器加料
人工加料至儲料倉,儲料倉振動補料至柔性供料器料盤。
上相機粗定位
零件在柔性供料器的料盤快速振散后,相機拍照,攝取料盤窗內(nèi)合適的零件形狀位置信息,將坐標(biāo)數(shù)據(jù)發(fā)送給機器人。
機械手取料
機器人基于視覺圖像處理器發(fā)送的坐標(biāo)位置數(shù)據(jù),移動至柔性料盤表面抓取零件。

下相機飛拍精定位-擺盤
機器人抓取零件移動,下相機飛拍,位置校正,實現(xiàn)擺盤或組裝。
◇ 系統(tǒng)功能:
產(chǎn)品在振動盤中振動,振動停止后,相機進行拍照,通過視覺圖像處理器處理后,識別出產(chǎn)品的正反,產(chǎn)品方向為正,運動機構(gòu)取走產(chǎn)品,產(chǎn)品方向為反,視為NG,不抓取產(chǎn)品,等待振動盤下一次振動。
