

 08寸手持控制器
08寸手持控制器 10寸控制器
10寸控制器 12寸控制器
12寸控制器 15寸控制器
15寸控制器 17寸控制器
17寸控制器 19寸控制器
19寸控制器 BK1系列伺服驅(qū)動器
BK1系列伺服驅(qū)動器 Bk2系列伺服驅(qū)動器
Bk2系列伺服驅(qū)動器 Bk3系統(tǒng)高性能伺服驅(qū)動器
Bk3系統(tǒng)高性能伺服驅(qū)動器 BKM多合一系列產(chǎn)品
BKM多合一系列產(chǎn)品 BKB低壓總線混合伺服驅(qū)動器
BKB低壓總線混合伺服驅(qū)動器 BKT系列電機
BKT系列電機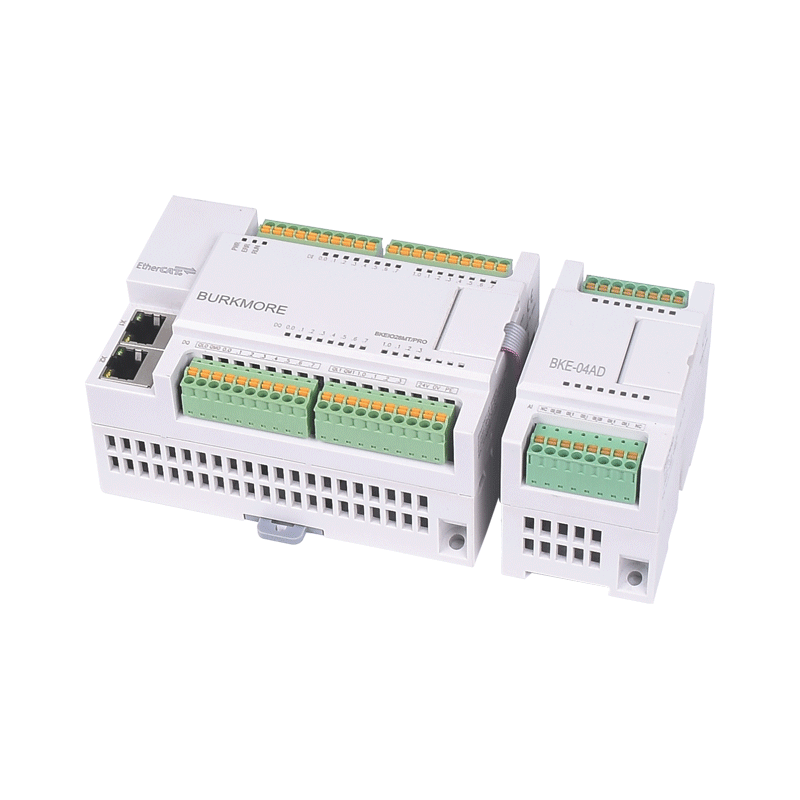 現(xiàn)場總線IO
現(xiàn)場總線IO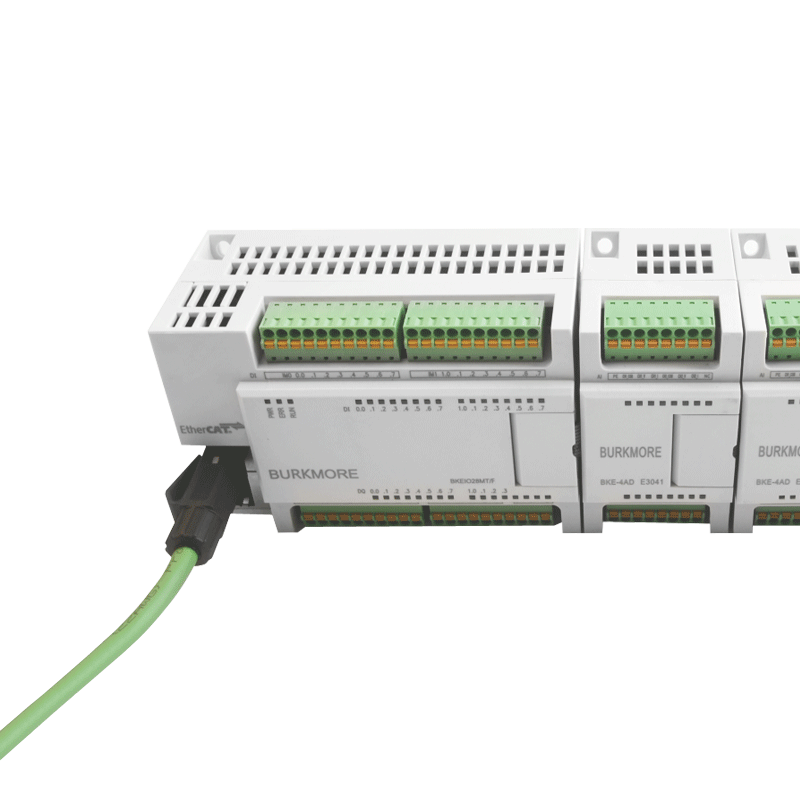 擴展模塊
擴展模塊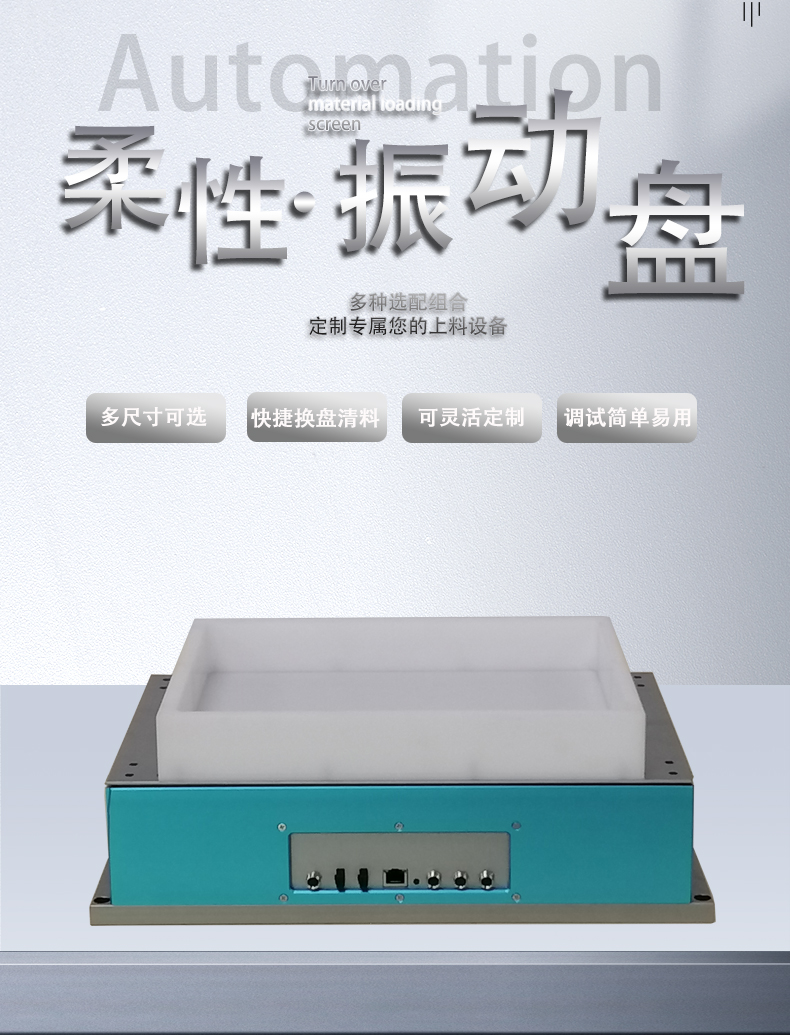 柔性振動盤|視覺供料設(shè)備
柔性振動盤|視覺供料設(shè)備 機器視覺
機器視覺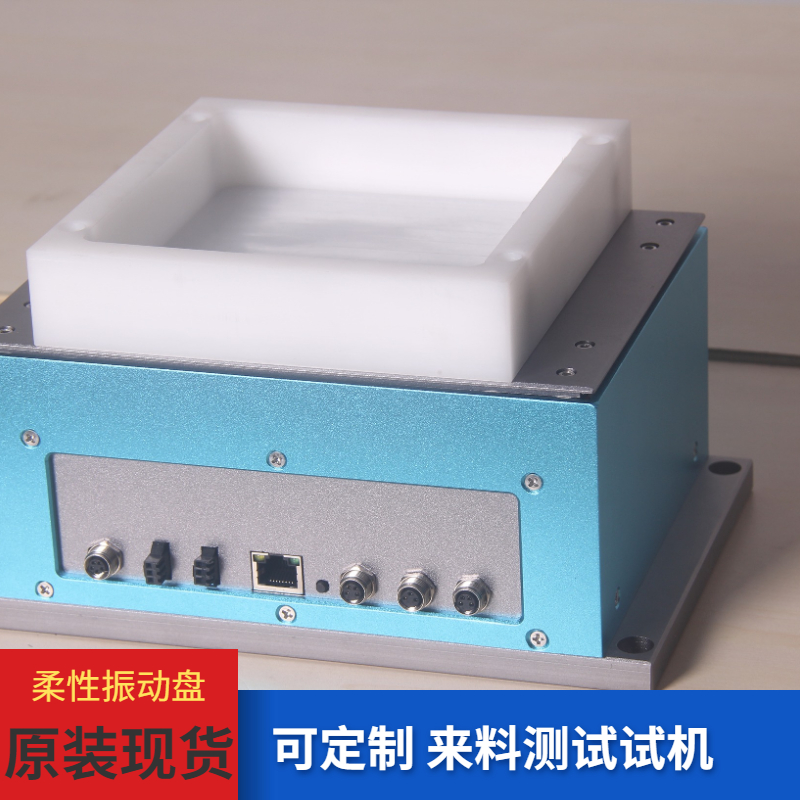 Burkmore柔性振動盤
Burkmore柔性振動盤 CDD柔性上料擺盤方案
CDD柔性上料擺盤方案 車床上下料機械手控制器操作說明
車床上下料機械手控制器操作說明




1.直角坐標(biāo)式機械手(行架機械手、龍門)
定義:手臂在直角坐標(biāo)系的三個坐標(biāo)軸方向作直線移動,即手臂的前后伸縮、上下升降和左右移動。這種坐標(biāo)形式占據(jù)空間大而工作范圍卻相對較小、慣性大,它適用于工作位置成直線排列的情況。
2.圓柱形坐標(biāo)機械手(沖床機械手)
定義:手臂前后伸縮。上下升降和水平擺動。與直角坐標(biāo)類型相比,空間小,工作范圍大,但由于機構(gòu)結(jié)構(gòu)的關(guān)系,高度方向的最低位置受到限制,地面上的物體不能被抓住,慣性相對較大。這是一種廣泛應(yīng)用于機械手中的坐標(biāo)形式。
3.極坐標(biāo)機械手(SCRAR機械手)
定義:手臂前后伸展。上下俯仰,左右擺動。它最大的特點是以簡單的機構(gòu)獲得更大的工作范圍,并能抓住地面上的物體。其運動慣性較小,但手臂擺角的誤差會通過手臂放大
4.多關(guān)節(jié)機械手(4關(guān)節(jié)、6關(guān)節(jié)機械手)
手臂分為大臂和小臂兩部分,由肘關(guān)節(jié)連接,大臂與柱連接成肩關(guān)節(jié),加上手腕與手臂之間的腕關(guān)節(jié),多關(guān)節(jié)機械手幾乎可以完成手的動作。多關(guān)節(jié)機械手動作靈活,運動慣性小。它能抓住靠近座椅的工件,繞過障礙物工作。多關(guān)節(jié)機械手適應(yīng)性廣泛。在吸引計算機控制后,它的動作控制可以通過程序和記憶模擬來完成。這是機械手的發(fā)展方向根據(jù)適用范圍,可分為專用機械手和通用機械手;根據(jù)運動軌跡控制模式,可分為點控制和連續(xù)軌跡控制機械手。
